KBK铝合金轨道起重机优势、原理及工业应用场景全解析在现代工业轻型起重、精密搬运与柔性流水线作业中,传统固定式行车、钢制KBK轨道设备存在自重过重、安装受限、易生锈、运行卡顿噪音大等诸多问题,无法适配精细化、无尘化、轻量化的新型生产车间需求。而KBK铝合金轨道起重机是新一代模块化柔性起重设备,结合了KBK模块化组合优势与铝合金材质的高性能特性,凭借轻便灵活、静音稳定、耐腐蚀、适配性广等特点,广泛应用于精密制造、新能源、汽车零部件、电子装配等行业,成为替代传统钢质起重设备的主流升级产品。本文从材质特性、工作原理、核心优点、应用场景多维度,全面解析KBK铝合金轨道起重机的工业应用价值。
一、KBK铝合金轨道起重机材质特性与工作原理
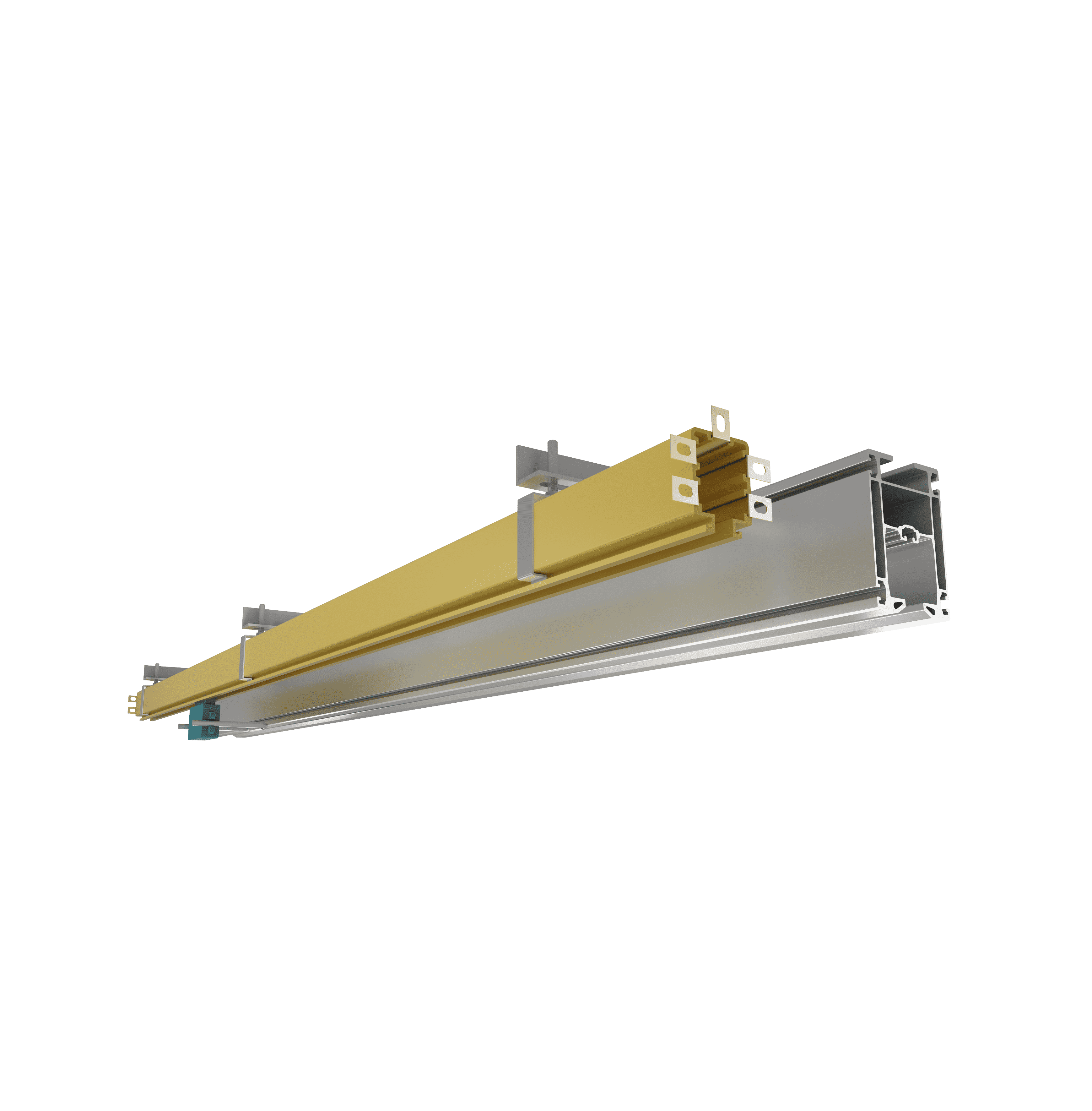
KBK铝合金轨道起重机的核心优势源于优质的工业专用铝合金材质,设备主体轨道采用高强度航空级铝合金型材挤压成型,表面经过加厚硬质阳极氧化工艺处理。和传统普通碳钢轨道相比,该材质实现了轻量化与高强度的完美平衡,同规格产品自重仅为钢制轨道的一半左右,承重性能稳定,抗弯曲、抗变形能力强,额定负载可满足工业轻型起重的全场景需求。同时氧化层致密耐磨,从根源杜绝生锈、腐蚀、掉渣问题,适配各类复杂生产环境。在工作原理上,KBK铝合金轨道起重机依托模块化柔性悬挂运行原理作业。设备由铝合金主梁、悬挂吊点、行走滑车、手动/电动行走机构、起重葫芦等模块组合而成,通过顶部悬挂装置固定在厂房顶面或轻型钢架上,形成可灵活移动的起重作业系统。利用铝合金轨道极低的摩擦系数特性,配合高精度耐磨滑车,操作人员可轻松推动负载,实现工件的水平平移、垂直升降。整套设备无硬性传动卡顿,依靠柔性随动运行模式,实现平稳启停、精准对位,彻底解决传统起重设备惯性晃动、定位偏差的问题。二、KBK铝合金轨道起重机核心优点
1、轻量化易安装,适配各类厂房。铝合金材质自重极轻,对厂房承重要求极低,无需对老旧厂房、轻型钢结构车间进行加固改造,大幅降低落地成本。设备采用标准模块化设计,所有配件可自由拼接、快速组装,无需大型施工设备,人工即可完成安装、拆卸与改造,施工周期短,可灵活适配不同工位布局。2、运行静音平稳,装配精度高。铝合金轨道内壁光滑平整,摩擦阻力小,运行过程中无卡顿、无撞击噪音,运行噪音远低于传统钢制KBK起重机,完全满足无尘车间、精密车间的静音作业标准。同时设备启停无惯性冲击,微动性能优异,能够实现毫米级精准定位,有效避免精密工件磕碰、偏移,大幅提升产品装配合格率。3、耐腐蚀免维护,使用寿命更长。区别于钢制轨道易生锈、需定期刷漆防锈的弊端,铝合金轨道自带抗氧化、抗腐蚀特性,不惧潮湿、粉尘、轻度酸碱腐蚀环境,长期使用不会产生锈渣、变形、卡顿等问题。设备结构简单、故障率低,无频繁损耗配件,日常仅需简单清洁检查即可,运维成本极低,正常使用寿命可达数十年。4、柔性拓展性强,通用性极高。KBK铝合金轨道支持直线、弯道、环形、多跨组合等多种搭建形式,可根据生产线升级、工位调整随时增减模块、更改作业半径。既能适配单点独立作业,也可搭建整线一体化起重系统,空间利用率高,完美适配现代化柔性生产模式。三、KBK铝合金轨道起重机主流应用场景
凭借材质与性能优势,KBK铝合金轨道起重机主打轻型、高频、精密、洁净作业,覆盖多行业精细化生产场景。在电子精密制造行业,广泛用于精密仪器、电路板、半导体配件、小型电子设备的搬运与装配,静音无尘、无锈渣掉落的特性,完全契合无尘洁净车间的生产标准,有效保护精密元器件不受震动与污染损伤。在汽车零部件与机械加工行业,多用于汽车内饰件、小型底盘配件、工装模具、五金配件的上下料、拆装与装配作业,高频次稳定运行的特性,能够适配流水线连续作业需求,大幅提升生产效率。在新能源行业,可用于光伏组件、锂电池配套配件、储能设备零部件的搬运装配,耐腐蚀材质可应对新能源车间潮湿、多粉尘的复杂工况。除此之外,设备还广泛应用于食品医药、航空航天、仓储物流等领域,尤其适合厂房承重有限、工位密集、对环境洁净度和作业噪音有严格要求的场景,是轻型精密起重作业的优选设备。四、设备综合价值总结
综上所述,KBK铝合金轨道起重机突破了传统钢制KBK设备笨重、易腐蚀、噪音大、适配性差的短板,依托优质铝合金材质优势和模块化柔性设计,兼具轻便、安全、精准、静音、免维护等多重优势。不仅能够降低企业设备安装、厂房改造和后期运维成本,还能有效提升车间作业效率与产品装配精度,改善车间作业环境。在工业生产向精细化、柔性化、洁净化升级的当下,KBK铝合金轨道起重机已然成为轻型起重设备升级换代的核心选择,适配绝大多数工业轻型吊装作业场景。